
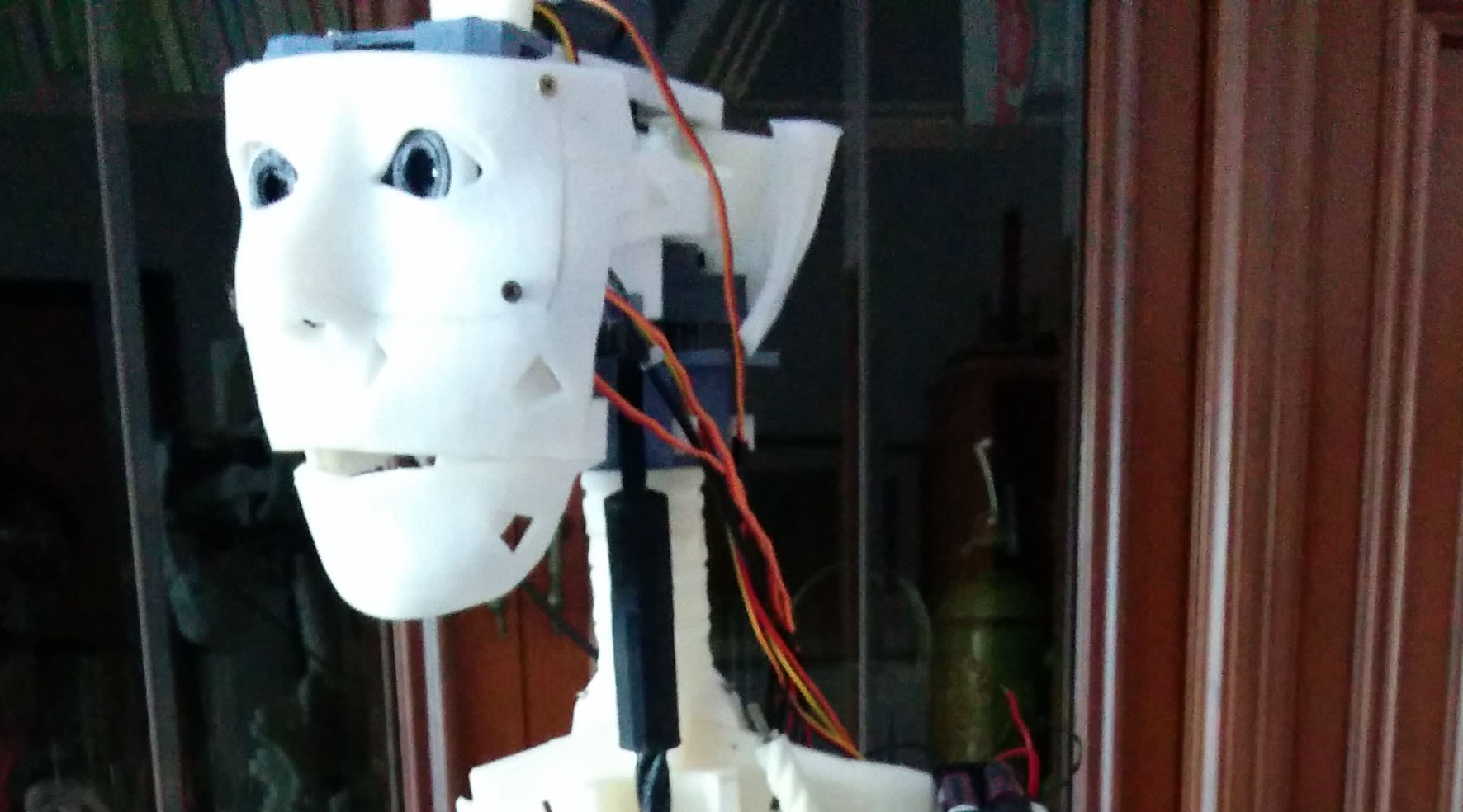
L’avvento delle stampanti 3D, associato ad un continuo abbassamento dei costi di gestione, ha dato vita ad un’impressionante numero di progetti, inimmaginabili se guardiamo al passato. Dopo armi, giocattoli e soprattutto parti di scorta, arriva InMoov, il robot umanoide e OpenSource fatto in casa. Sì, proprio così, in casa! Come la pasta fresca o il pesto della nonna.
InMoov è un’idea di Gael Langevin, scultore francese, che un giorno decide di chiudersi nel suo laboratorio con la sua stampante 3D per costruirsi il suo robot personale: InMoov (da cui deriva il nome del progetto).
Il cervello di InMoov è MYROBOTLAB, software open source che chiunque può scaricare ed elaborare, aggiungendo nuove funzioni o ottimizzando quelle già esistenti. Il programma nasce da un progetto di Greg Perry, architetto software californiano, che grazie alla potenza della rete ha iniziato la collaborazione con Gael proprio per InMoov.
Oggi il robot è dotato di testa, torso e braccia, ma presto sarà dotato anche di gambe grazie proprio all’approccio open source. Chiunque può scaricare gratuitamente i file 3D delle parti del robot, stamparle e contribuire al progetto. Il costo totale dei materiali e dell’elettronica (stampante 3D esclusa) è inferiore a 800 Euro, un prezzo davvero accessibile per un robot umanoide.
Molti si sono interessati e avvicinati a questo progetto, tra cui Alessandro Didonna, Ambasciatore Italiano di InMoov e studente di ingegneria meccanica al Politecnico di Bari. Alessandro, grazie alla bobina di Tesla, si appassiona al mondo dell’elettronica, ma è internet che ha giocato il suo ruolo chiave, facendogli scoprire InMoov. Tuttavia Alessandro non è l’unico italiano ad avere a che fare col progetto: InMoov ha un cuore verde, bianco e rosso, Arduino.
A questo punto vi starete chiedendo perché parlare di un robot in un blog sui prodotti Microsoft: Alessandro utilizza Kinect – il sensore sviluppato da Microsoft per Xbox – per rendere il robot più umanoide possibile.
Come? Sfruttando il Kinect per il riconoscimento del viso, per i gesti e per afferrare gli oggetti. Infatti, grazie al sensore di profondità presente nel device, è in grado di fornire al software le coordinate nello spazio, creando una mappa tridimensionale che può consentire al robot di ottenere una particolare interazione uomo-macchina.
V: Quale obiettivo vi siete prefissati con questo progetto?
A: Sicuramente consentire al robot di riconoscere gesti e afferrare oggetti nello spazio. Cosa possibile grazie al Kinect.
V: Ci sono altre tecnologie che svolgono questa interazione oltre al Kinect?
A: In realtà ci sono, ma sono molto più costose. Il rapporto qualità-prezzo del Kinect non lo batte nessuno. Un dispositivo sottovalutato che funziona anche al buio grazie al sensore a infrarossi.
V: Noto che per realizzare questo progetto hai utilizzato il primo Microsoft Kinect; cosa sai o cosa pensi del Kinect 2 disponibile con la nuova Xbox One? Potrebbe esserti d’aiuto con il tuo progetto?
A: A dire il vero ho poche informazioni a riguardo. Ho letto che adesso il dispositivo è in grado di tracciare più persone contemporaneamente, di individuare le singole dita di una mano e di rilevare il battito cardiaco, inoltre, ho letto che la videocamera è ad alta definizione, grandangolare. Quest’ultima caratteristica è molto importante perché, come l’occhio umano che riesce a guardare fino a 120-140 gradi, permetterebbe al robot di avere una visuale molto simile a quella dell’uomo.
V: Cosa chiederesti a Microsoft?
A: Credo che bisognerebbe dar modo agli sviluppatori di lavorare su Kinect, perché per realizzare quello che io ho sviluppato in casa vanno sfruttate librerie presenti su My Robot Lab. Sarebbe ideale ricevere da parte di Microsoft delle librerie Java con i relativi esempi di utilizzo, in Java, piuttosto che in C, C++ e Visual Basic 10, poiché Java funziona su qualsiasi piattaforma. Penso che questo aprirebbe la strada a più sviluppatori per lavorare su Kinect, visto che, come posso dimostrare oggi, è possibile sfruttarlo non solo in campo gaming.
V: Concludendo, cosa ne pensi del progetto InMoov?
A: È la terza rivoluzione industriale! Perché se mi venisse in mente un’idea, ad esempio un nuovo cavatappi, non avrei bisogno di venderne quantità industriali prima per poter iniziare a guadagnarci successivamente. Così potrei stamparmelo direttamente, oppure, se mi si rompesse la maniglia della porta, non avrei bisogno di comprarne una nuova, me la stamperei senza ricorrere a intermediari. Un po’ quello che ha fatto Gael con il suo robot, ideare e prototipare immediatamente grazie alla stampa 3D.
Se volete approfondire l’argomento potete visitare il sito web del progetto InMoov www.inmoov.fr e il sito web del software MyRobotLab www.myrobotlab.org. Qui di seguito due video del robot di Alessandro.
Articolo di Windows Blog Italia
Autore | Vito Vallarella










